Instrument2RmsPlotGrid
This program computes an RMS plot grid from one or more inputfileInstrument containing 3D data (e.g. orbits or station positions), which can then be plotted as gridded data in PlotGraph. The RMS is computed from the difference between inputfileInstrument and inputfileInstrumentReference. All instrument files must be synchronized (see InstrumentSynchronize).
Each separate inputfileInstrument represents an entry (e.g. a satellite or station) in the resulting grid. Therefore, providing, for example, 32 orbit files of GPS satellites results in a grid with columns: mjd, id (0-31), rms.
The first three data columns of the instrument data are considered for computation of the RMS values. The factor can be set to, for example, sqrt(3) to get 3D instead of 1D RMS values.
If timeIntervals are provided, each inputfileInstrument
and inputfileInstrumentReference serves as a template with variable loopTime.
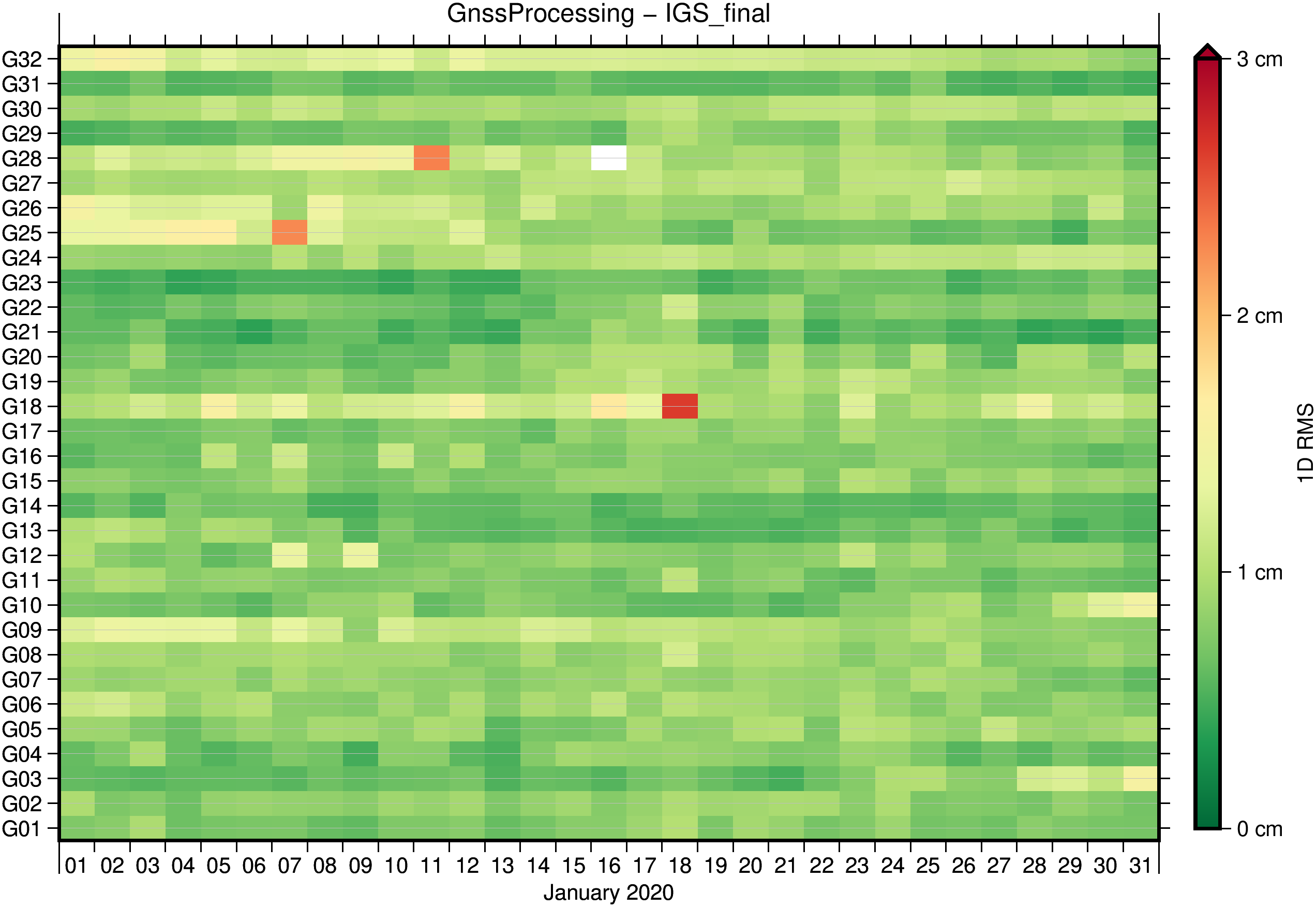
This allows concatenation of instrument files, for example to create a month-long RMS plot grid from daily GPS
orbit files (see below).
Helmert parameters between the two frames can be estimated each epoch optionally if estimateShift, estimateScale, or estimateRotation are set. It uses a robust least squares adjustment.
| Name | Type | Annotation |
|---|---|---|
outputfileRmsPlotGrid | filename | columns: mjd, id, rms |
outputfileHelmertTimeSeries | filename | columns: mjd, tx, ty, tz, scale, rx, ry, rz |
inputfileInstrument | filename | one file per satellite/station |
inputfileInstrumentReference | filename | one file per satellite/station, same order as above |
timeIntervals | timeSeries | for {loopTime} variable in inputfile |
factor | double | e.g. sqrt(3) for 3D RMS |
estimateShift | boolean | coordinate center every epoch |
estimateScale | boolean | scale factor of position every epoch |
estimateRotation | boolean | rotation every epoch |
huber | double | for robust least squares |
huberPower | double | for robust least squares |
huberMaxIteration | uint | (maximum) number of iterations for robust estimation |