PlatformCreate
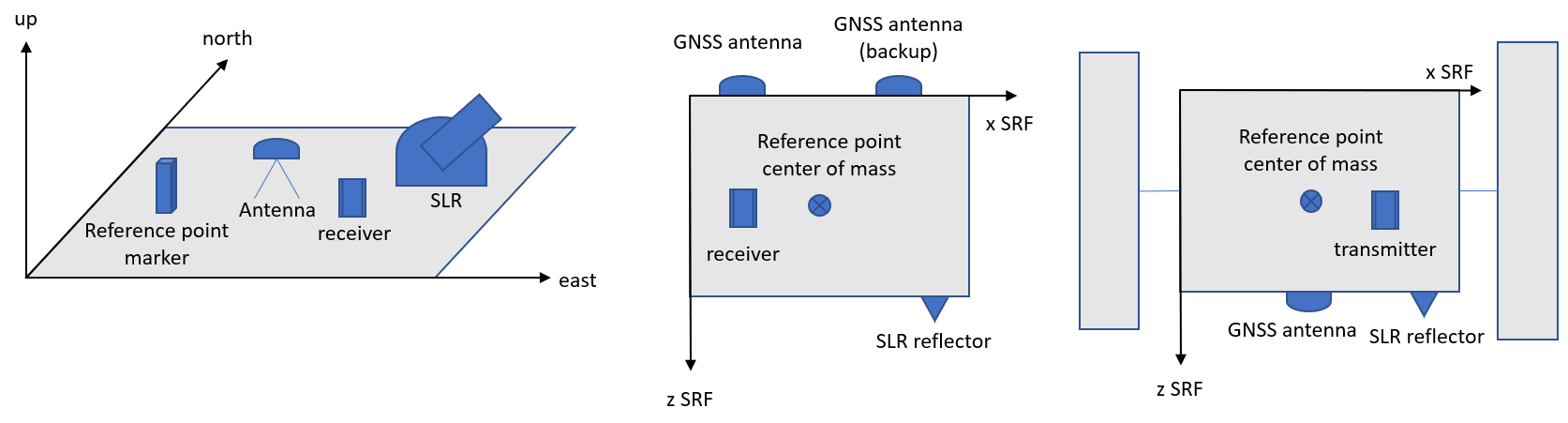
Create a Platform file from scratch by defining attributes such as markerName, markerNumber, comment, approxPosition, equipment.
See also GnssAntex2AntennaDefinition and GnssStationLog2Platform.
| Name | Type | Annotation |
|---|---|---|
outputfilePlatform | filename | |
markerName | string | |
markerNumber | string | |
comment | string | |
approxPositionX | double | [m] in TRF |
approxPositionY | double | [m] in TRF |
approxPositionZ | double | [m] in TRF |
equipment | choice | |
gnssAntenna | sequence | |
name | string | |
serial | string | |
radome | string | |
comment | string | |
timeStart | time | |
timeEnd | time | |
positionX | double | [m] ARP in north, east, up or vehicle system |
positionY | double | [m] ARP in north, east, up or vehicle system |
positionZ | double | [m] ARP in north, east, up or vehicle system |
rotationX | angle | [degree] from local/vehicle to left-handed antenna system |
rotationY | angle | [degree] from local/vehicle to left-handed antenna system |
rotationZ | angle | [degree] from local/vehicle to left-handed antenna system |
flipX | boolean | flip x-axis (after rotation) |
flipY | boolean | flip y-axis (after rotation) |
flipZ | boolean | flip z-axis (after rotation) |
gnssReceiver | sequence | |
name | string | |
serial | string | |
version | string | |
comment | string | |
timeStart | time | |
timeEnd | time | |
laserRetroReflector | sequence | |
name | string | e.g. GFZ, ITE, IPIE |
serial | string | |
comment | string | |
timeStart | time | |
timeEnd | time | |
positionX | double | [m] optial reference point RP in satellite system |
positionY | double | [m] optial reference point RP in satellite system |
positionZ | double | [m] optial reference point RP in satellite system |
rotationX | angle | [degree] from local/vehicle to LRR system |
rotationY | angle | [degree] from local/vehicle to LRR system |
rotationZ | angle | [degree] from local/vehicle to LRR system |
flipX | boolean | flip x-axis (after rotation) |
flipY | boolean | flip y-axis (after rotation) |
flipZ | boolean | flip z-axis (after rotation) |
range | double | [m] range bias (only without range matrix) |
inputfileRangeMatrix | filename | [m] (azimuth(0..360) x zenith(0..dZenit*rows) |
dZenit | angle | [degree] increment of range matrix |
geodeticSatellite | sequence | e.g. LAGEOS |
name | string | |
serial | string | |
comment | string | |
timeStart | time | |
timeEnd | time | |
range | double | [m] standard center-of-mass correction |
slrStation | sequence | |
name | string | CDP SOD 8-digit No. |
serial | string | IERS DOMES |
comment | string | |
timeStart | time | |
timeEnd | time | |
positionX | double | [m] eccentricity in north |
positionY | double | [m] eccentricity in east |
positionZ | double | [m] eccentricity in up |
satelliteIdentifier | sequence | |
name | string | |
serial | string | |
cospar | string | Satellite COSPAR ID |
norad | string | Satellite Catalog (NORAD) Number |
sic | string | SIC Code |
sp3 | string | SP3 |
comment | string | |
timeStart | time | |
timeEnd | time | |
other | sequence | |
name | string | |
serial | string | |
comment | string | |
timeStart | time | |
timeEnd | time | |
positionX | double | [m] in north, east, up or vehicle system |
positionY | double | [m] in north, east, up or vehicle system |
positionZ | double | [m] in north, east, up or vehicle system |
referencePoint | sequence | e.g. center of mass in satellite frame |
comment | string | |
xStart | double | [m] in north, east, up or vehicle system |
yStart | double | linear motion between start and end |
zStart | double | |
xEnd | double | [m] in north, east, up or vehicle system |
yEnd | double | linear motion between start and end |
zEnd | double | |
timeStart | time | |
timeEnd | time |