GnssAttitudeInfoCreate
Creates attitude info file (Instrument(MISCVALUES)) used by SimulateStarCameraGnss. One or more attitudeInfos can be specified. They are valid from timeStart until the start of the subsequent attitudeInfo. maxManeuverTime is used by SimulateStarCameraGnss to look for ongoing orbit maneuvers before/after the given orbit that might affect the attitude at the beginning or end of a given orbit.
Here is a list of GNSS satellite types for which the attitude behavior is known and their respective attitude modes and required parameters:
- GPS-II/IIA [1]
- defaultMode: nominalYawSteering
- midnightMode: shadowMaxYawSteeringAndRecovery
- noonMode: catchUpYawSteering
- maxYawRate: 0.12 deg/s
- yawBias: 0.5 deg
- maxManeuverTime: 2 h
Some specific satellites may deviate in their attitude behavior or parameters (e.g. G013-G040, R713, C005, C015, C017, J001).
References for the attitude behavior information:
- Kouba (2009)
- Kuang et al. (2017)
- Dilssner et al. (2011)
- https://www.gsc-europa.eu/support-to-developers/galileo-satellite-metadata#3
- Wang et al. (2018)
- Li et al. (2018)
- https://qzss.go.jp/en/technical/qzssinfo/index.html
| Name | Type | Annotation |
|---|---|---|
outputfileAttitudeInfo | filename | |
attitudeInfo | sequence | |
timeStart | time | |
defaultMode | choice | default attitude mode |
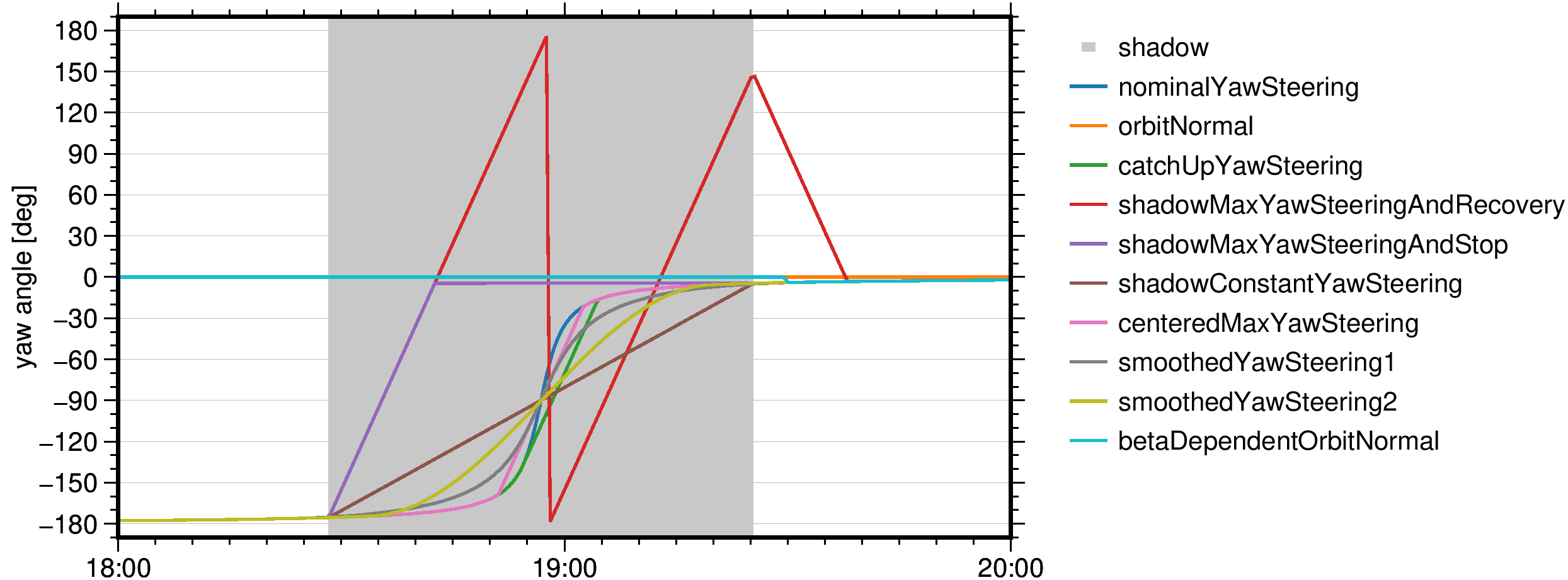
nominalYawSteering | yaw to keep solar panels aligned to Sun (e.g. most GNSS satellites outside eclipse) | |
orbitNormal | keep fixed yaw angle, for example point X-axis in flight direction (e.g. BDS-2G, BDS-3G, QZS-2G) | |
midnightMode | choice | attitude mode for maneuvers around orbit midnight |
nominalYawSteering | yaw to keep solar panels aligned to Sun (e.g. most GNSS satellites outside eclipse) | |
orbitNormal | keep fixed yaw angle, for example point X-axis in flight direction (e.g. BDS-2G, BDS-3G, QZS-2G) | |
catchUpYawSteering | yaw at maximum yaw rate to catch up to nominal yaw angle (e.g. GPS-* (noon), GPS-IIR (midnight)) | |
shadowMaxYawSteeringAndRecovery | yaw at maximum yaw rate from shadow start to end, recover after shadow (e.g. GPS-IIA (midnight)) | |
shadowMaxYawSteeringAndStop | yaw at maximum yaw rate from shadow start until nominal yaw angle at shadow end is reached, then stop (e.g. GLO-M (midnight)) | |
shadowConstantYawSteering | yaw at constant yaw rate from shadow start to end (e.g. GPS-IIF (midnight)) | |
centeredMaxYawSteering | yaw at maximum yaw rate centered around noon/midnight (e.g. QZS-2I, GLO-M (noon)) | |
smoothedYawSteering1 | yaw based on an auxiliary Sun vector for a smooth yaw maneuver (e.g. GAL-1) | |
smoothedYawSteering2 | yaw based on a modified yaw-steering law for a smooth yaw maneuver (e.g. GAL-2, BDS-3M, BDS-3I) | |
betaDependentOrbitNormal | switch to orbit normal mode if below beta angle threshold (e.g. BDS-2M, BDS-2I, QZS-1) | |
noonMode | choice | attitude mode for maneuvers around orbit noon |
nominalYawSteering | yaw to keep solar panels aligned to Sun (e.g. most GNSS satellites outside eclipse) | |
orbitNormal | keep fixed yaw angle, for example point X-axis in flight direction (e.g. BDS-2G, BDS-3G, QZS-2G) | |
catchUpYawSteering | yaw at maximum yaw rate to catch up to nominal yaw angle (e.g. GPS-* (noon), GPS-IIR (midnight)) | |
centeredMaxYawSteering | yaw at maximum yaw rate centered around noon/midnight (e.g. QZS-2I, GLO-M (noon)) | |
smoothedYawSteering1 | yaw based on an auxiliary Sun vector for a smooth yaw maneuver (e.g. GAL-1) | |
smoothedYawSteering2 | yaw based on a modified yaw-steering law for a smooth yaw maneuver (e.g. GAL-2, BDS-3M, BDS-3I) | |
betaDependentOrbitNormal | switch to orbit normal mode if below beta angle threshold (e.g. BDS-2M, BDS-2I, QZS-1) | |
maxYawRate | double | [degree/s] maximum yaw rate of the satellite |
yawBias | double | [degree] yaw bias applied in satellite attitude control system |
midnightBetaThreshold | double | [degree] limit midnight maneuver to this absolute angle of the Sun above/below the satellite orbital plane |
noonBetaThreshold | double | [degree] limit noon maneuver to this absolute angle of the Sun above/below the satellite orbital plane |
activationThreshold | double | [degree] limit maneuver to this yaw/Earth-spacecraft-Sun angle (depending on mode) |
maxManeuverTime | double | [s] maximum duration of maneuver or maximum maneuver lookup time before/after orbit start/end |