SimulateStarCameraGnss
This program simulates star camera measurements at each satellite position of inputfileOrbit. The resulting rotation matrices rotate from body frame to inertial frame. The body frame refers to the IGS-specific (not the manufacturer-specific) body frame, as described by Montenbruck et al. (2015). The inputfileOrbit must contain velocities (use OrbitAddVelocityAndAcceleration if needed).
Information about the attitude mode(s) used by the GNSS satellite may be provided via inputfileAttitudeInfo. This file can be created with GnssAttitudeInfoCreate. It contains one or more time-dependent entries, each defining the default attitude mode, the attitude modes used around orbit noon and midnight, and some parameters required by the various modes. If no inputfileAttitudeInfo is selected, the program defaults to a nominal yaw-steering attitude model. A sufficiently high modelingResolution ensures that the attitude behavior is modeled properly at all times.
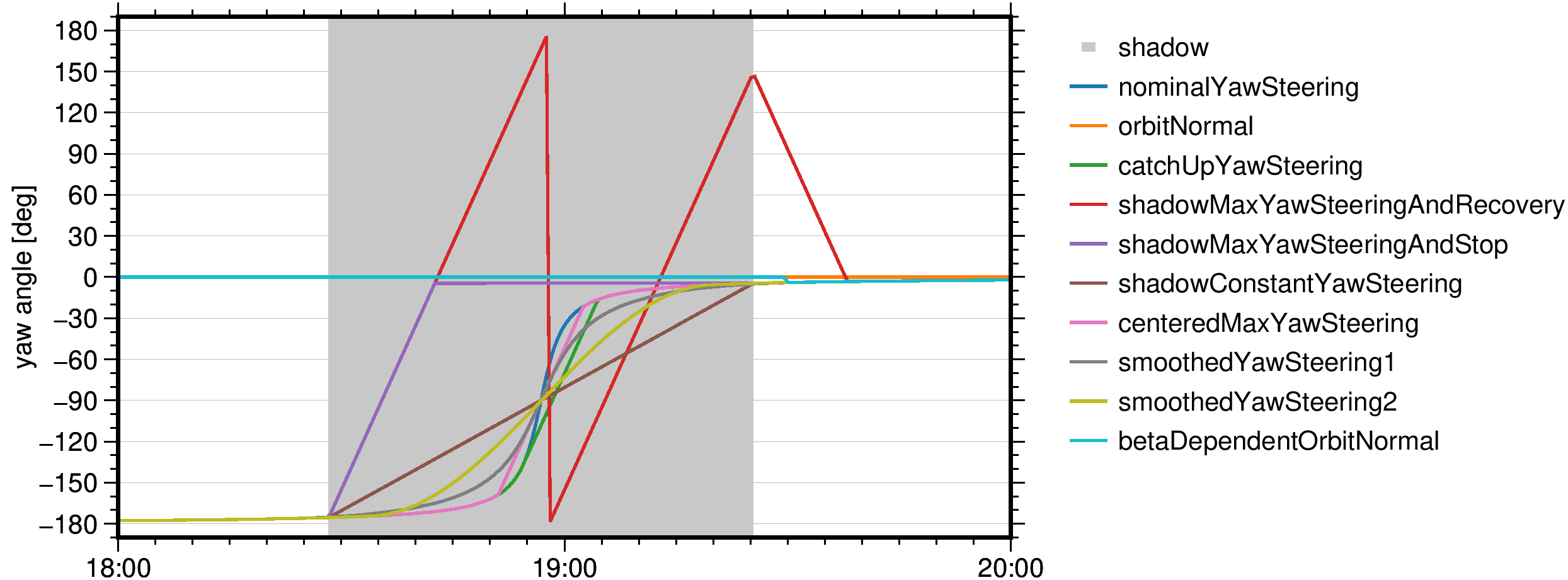
The attitude behavior is defined by the respective mode. Here is a list of the supported modes with a brief explanation and references:
- nominalYawSteering: Yaw to keep solar panels aligned to Sun (e.g. most GNSS satellites outside eclipse) [1]
- orbitNormal: Keep fixed yaw angle, for example point X-axis in flight direction (e.g. BDS-2G, BDS-3G, QZS-2G) [1]
- catchUpYawSteering: Yaw at maximum yaw rate to catch up to nominal yaw angle (e.g. GPS-* (noon), GPS-IIR (midnight)) [2, 3]
- shadowMaxYawSteeringAndRecovery: Yaw at maximum yaw rate from shadow start to end, recover after shadow (e.g. GPS-IIA (midnight)) [2]
- shadowMaxYawSteeringAndStop: Yaw at maximum yaw rate from shadow start until nominal yaw angle at shadow end is reached, then stop (e.g. GLO-M (midnight)) [4]
- shadowConstantYawSteering: Yaw at constant yaw rate from shadow start to end (e.g. GPS-IIF (midnight)) [3]
- centeredMaxYawSteering: Yaw at maximum yaw rate centered around noon/midnight (e.g. QZS-2I, GLO-M (noon)) [4, 8]
- smoothedYawSteering1: Yaw based on an auxiliary Sun vector for a smooth yaw maneuver (e.g. GAL-1) [5]
- smoothedYawSteering2: Yaw based on a modified yaw-steering law for a smooth yaw maneuver (e.g. GAL-2, BDS-3M, BDS-3I) [5, 6]
- betaDependentOrbitNormal: Switch to orbit normal mode if below beta angle threshold (e.g. BDS-2M, BDS-2I, QZS-1) [7, 8]
See GnssAttitudeInfoCreate for more details on which satellite uses which attitude modes and the required parameters for each mode.
References for the attitude modes:
- Montenbruck et al. (2015)
- Kouba (2009)
- Kuang et al. (2017)
- Dilssner et al. (2011)
- https://www.gsc-europa.eu/support-to-developers/galileo-satellite-metadata#3
- Wang et al. (2018)
- Li et al. (2018)
- https://qzss.go.jp/en/technical/qzssinfo/index.html
| Name | Type | Annotation |
|---|---|---|
outputfileStarCamera | filename | rotation from body frame to CRF |
inputfileOrbit | filename | attitude is modeled based on this orbit |
inputfileAttitudeInfo | filename | attitude modes used by the satellite and respective parameters |
interpolationDegree | uint | polynomial degree for orbit interpolation |
modelingResolution | double | [s] resolution for attitude model evaluation |
ephemerides | ephemerides | |
eclipse | eclipse | model to determine if satellite is in Earth's shadow |